Reversing embedded device bootloader (U-Boot) - p.1
This blog post is not intended to be a “101” ARM firmware reverse-engineering tutorial or a guide to attacking a specific IoT device. The goal is to share our experience and, why not, perhaps save you some precious hours and headaches.
“Bootrom”
In this two posts series, we will share an analysis of some aspects of reversing a low-level binary.
Why? Well, we have to admit we struggled a bit to collect the information to build the basic knowledge about this topic and the material we found was often not comprehensive enough, or many aspects were taken for granted.
For this reason, we share here what we learned from multiple sources and try to collect them in these posts, while also trying to give some context and analyze the more complex or cryptic aspects.
Some context before the 🛫:
- The CPU is an ARM-Cortex A7.
- The bootloader is a customized U-Boot (the binary is stripped).
- We found the datasheet of the SOC.
- We got the firmware image from the vendor site.
- Kernel and rootfs are encrypted, presumably by a “custom” cryptographic approach
- The IoT device doesn’t use ARM Trust Zone.
- The device has secure boot enforced.
The main goal was to reverse the custom crypto function, retrieve the encryption key, and decrypt the kernel image. The adventured ended slightly in a different way, but, spoiler alert, we did manage to decrypt the kernel image.
What is a bootloader?
The first program that runs when a computer starts up is the bootloader, which loads the operating system. It is typically stored on an EEPROM or a NOR flash memory (a type of persistent flash memory) part of the computer hardware. Its function is to initialize the various system components: from the CPU registers to the device controllers and the central memory content. The start-up program needs to locate, load into main memory and then transfer control to the operating system, so that it can then start offering services to the system.
Some computer systems use a multistage boot process: when the computer is first turned on, a small bootloader located in non-volatile memory, known as the BIOS, is executed; this initial program then loads a second bootloader situated in a fixed area of the disk (called the boot block). The second start-up program is more complex (think something like Grub, which is many thousands of lines of code) than its loader and does all the required heavy lifting of setting up enough support to more easily load the operating system.
For a real-world example, we suggest looking into this external resource: ARM boot process.
We won’t go into the technical details of the Das U-Boot implementation, but it’s enough to say that U-Boot is an open-source primary bootloader used mainly in embedded devices.
NOTE: “Primary bootloader” doesn’t mean that U-Boot must be the first-stage bootloader - it could be used at any stage
L◔_◔king around
After downloading the firmware, we used Binwalk to extract it.

Unfortunately that didn’t produce the expected results, as it didn’t recognize nor extract the (expected) various partitions.
What this usually means is that files are probably encrypted somehow or have - unlikely, but possible - a custom format. We can verify the first assumption by checking the entropy of the single file. Binary files tend to have frequent repetitions of certain instructions (e.g. prologues, nop sequences, etc) and data structures are hardly random. Long sequences of zeroes are also quite common in the data segment, when not everything can be deferred to bss. On the contrary, an encrypted file will have nearly perfect entropy, since that’s kind of the goal of a robust encryption scheme 😉
To make this check, one can use the Binwalk --entropy flag, to check the entropy of all the firmware files.
As you can notice from the graph in the picture, most of the files have an almost perfectly flattered Y-axis entropy value of one (1) - this confirms they are encrypted.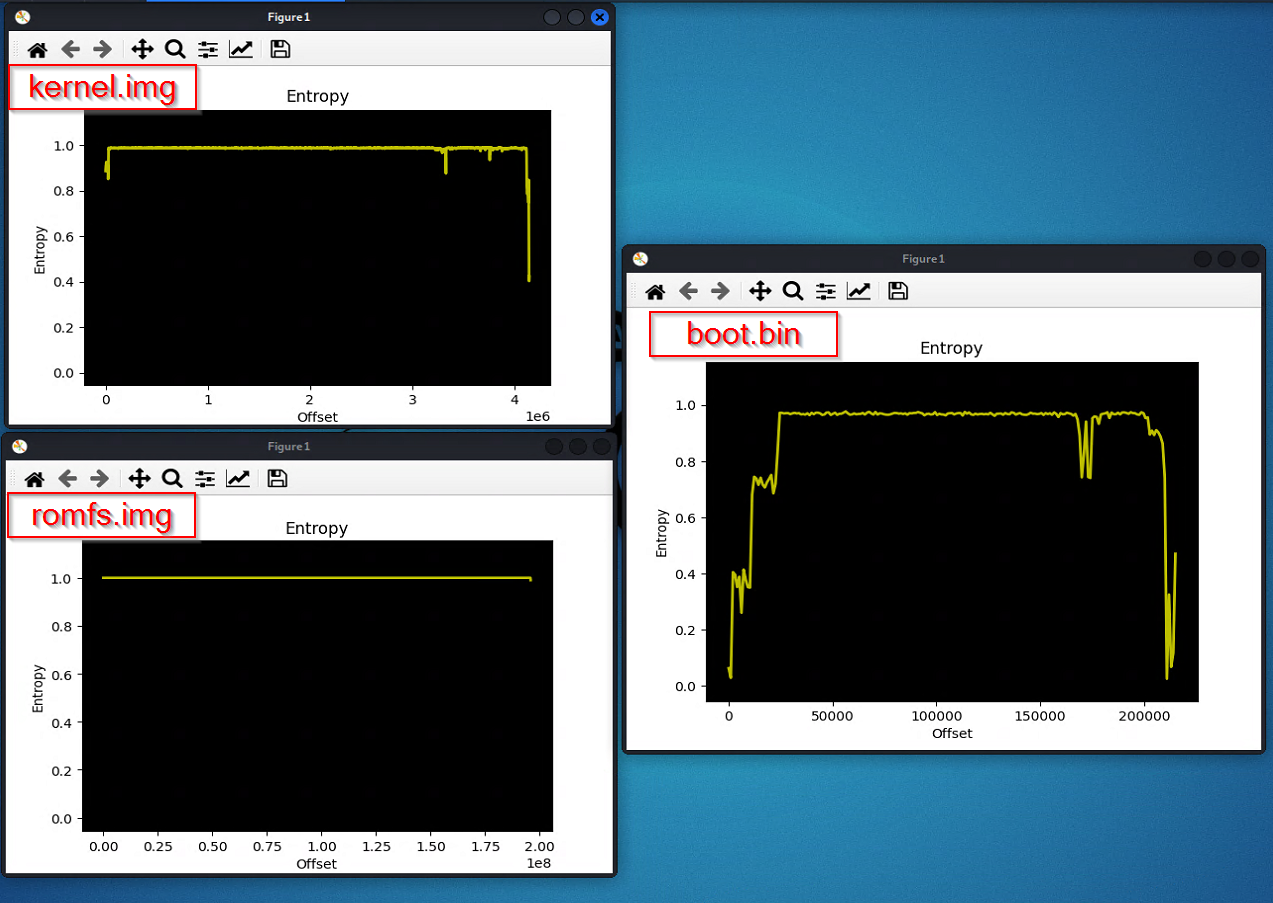
The boot.bin file instead stands out as it doesn’t have a high constant entropy. See those drops? That’s the repetitions we talked about.
We can therefore make an educated guess about the fact that the clear-text bootloader is the one in charge of decrypting the other partitions during the boot process, right before starting kernel execution.
We still didn’t know how much of the decryption logic is in the bootloader: it could be decrypting everything or just the kernel, who would then proceed to use its own set of keys/algorithms to decrypt the rest of filesystem. This latter approach is not uncommon both in encrypted and verified chains.
Armed with this current assumption, we extracted the boot image from the firmware with Binwalk (no black magic, only binwalk -e firmware.bin) and then run Binwalk again to extract the boot.bin file.
Let’s run strings boot.bin just to make sure we’re not completely bonkers.
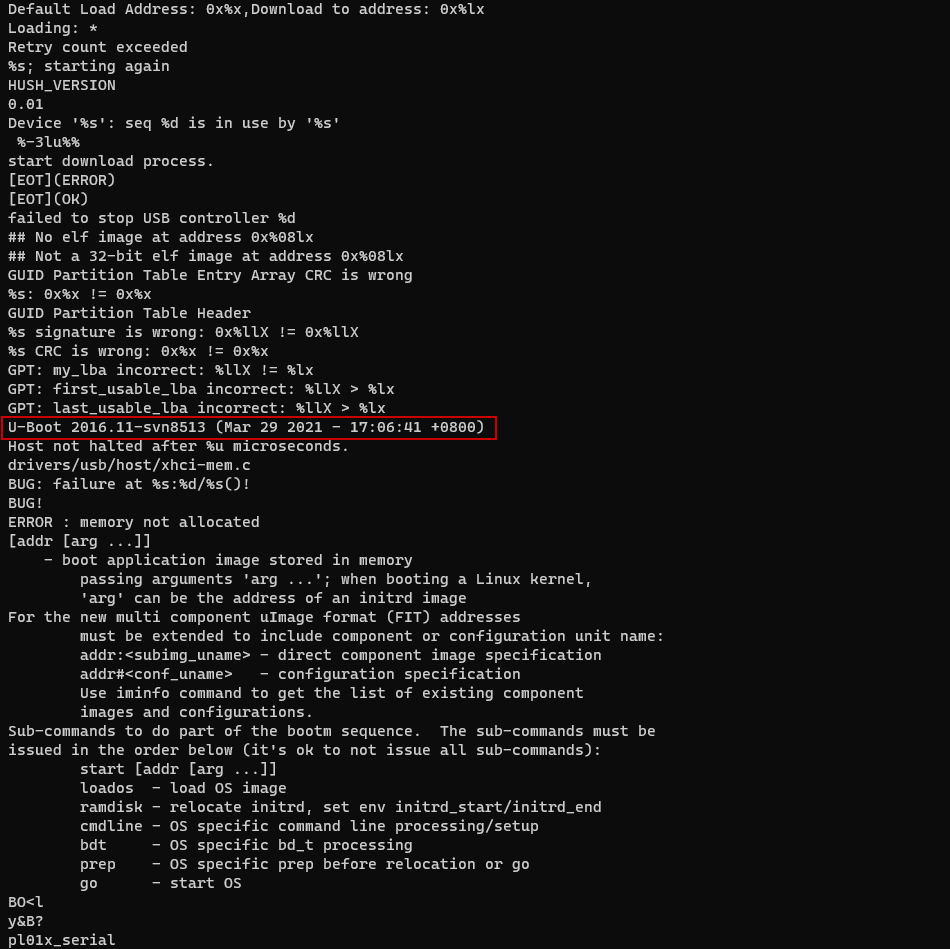
Yay - we have a proper U-Boot binary! Let’s check the boot arguments: strings boot.bin | grep args.
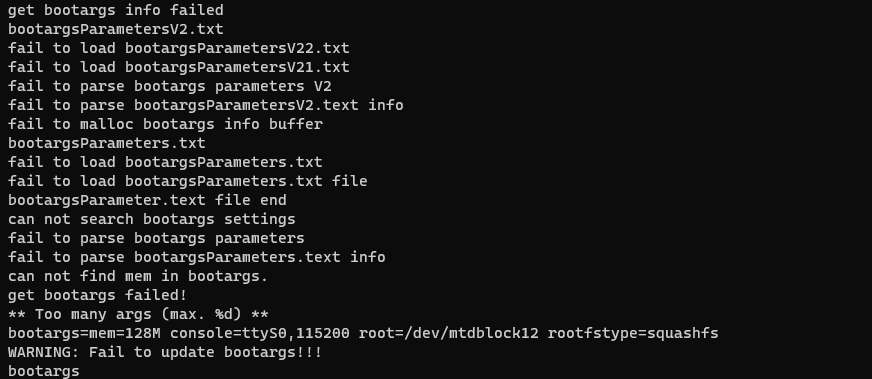
Nothing special, but now we know where the squashfs rootfs is stored: /dev/mtdblock12.
What else can we learn? Well, let’s look for some addresses to get an idea of how this thing will look like in memory. Looking at the datasheet we found a table with all the device addresses mapped and - not that surprisingly if you are used to ARM - that the RAM starts at 0x8000_0000.
Time for some extra grep-fu: strings u-boot.bin | grep 0x
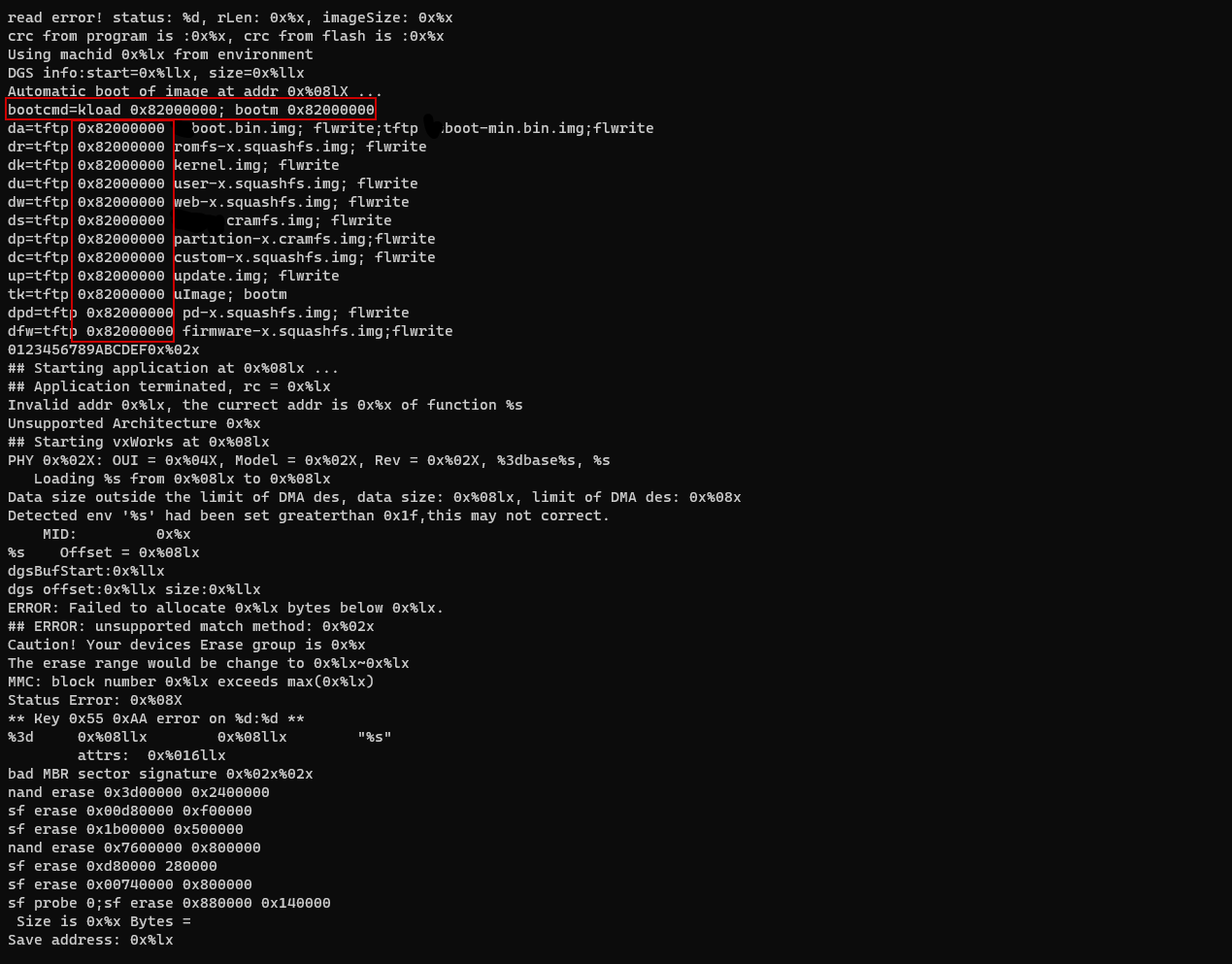
Okay, so if the RAM starts at 0x8000_0000 it makes sense that the kernel is loaded at 0x8200_0000.
But what is loaded from 0x8000_0000 to 0x8200_0000?
And where is U-Boot loaded?
It should be loaded in a fixed address since it’s the bootloader!
zi0black: I’ve just taken my operating systems exams at university, and I’m very confident about this. I could have probably looked more deeply into the datasheet or other documentation to find out, but I chose a different way.
Dissection of a bare metal binary (ARM)
Binary files are the essence of what is loaded and interpreted/executed by a computer. In their essence, they are just a sequence of bytes that gets splatted in memory and has enough information to get the execution going. In practice, there can be much more to them in order to support dynamic linking, shared libraries, runtime relocations and all the other flexibility we almost take for granted when we compile a binary on one system and run it on another, or see it pick up a fixed library after a security update. On top of that, a program needs to do something useful to fulfill its existential meaning (yeah, let’s get philosophical). To achieve this it will most likely need to interact with the system, allocate some memory, maybe store some data to disk. We don’t expect all binaries to implement this logic: the operating system is there for them.
The picture we just described above is the one you normally encounter with an (ELF) running on a Linux environment. Of course, bringing up all this ecosystem has a non trivial cost: you need a fully working operating system, a dynamic linker and all the libraries. In IoT or other memory constrained environments - or in cases where you don’t want all these layers of abstractions in the way (think some specialized cloud workload or similar) - one can have a single binary do everything it needs and just what it needs. This is the central idea behind Bare Machine Computing (BMC). In the BMC paradigm, applications run without the support of any operating system (OS) or centralized Kernel, i.e., no intermediary software is loaded on the bare machine prior to running applications.
All we get with BMC is a big static flat file that will just start executing and manage memory, handle interrupts and (if needed) access hardware directly by itself. It’s quite common for these binaries, since they are the only entity in execution, to not have to implement any form of virtual memory, as there’s really no “separation” that needs to be created, nor there’s the need to go beyond the amount of installed memory with some form of paging. For our analysis, this means that if we are dealing with a bare-metal binary, we will find lots of information about the memory layout directly where we would “normally” (e.g. with an ELF file) find runtime-resolved relocations. Goes without saying, U-Boot is a bare-metal binary.
Interrupts
Let’s briefly touch on interrupts, too, before moving to our target binary and understand its structure.
Hardware components can generate an interruption at any time by sending a signal to the CPU, usually via the system bus (there can be many buses within a processing system, but the system bus is the primary communication path between the core components). Interrupts are also used for many other purposes and are crucial for the interactions between the operating systems and the underlying hardware. When the CPU receives an interrupt signal, it stops the current processing and immediately jumps to some fixed memory region.
It should be noted that there is no black magic behind the change of context due to the execution of an interrupt handler, except for CPU peculiarities if present (e.g. an additional set of registers that saves to the programmer some of the context switch heavy lifting). The interrupt handler is responsible to save the current state/registers (context) and later restore them to correctly resume execution of the interrupted instruction stream once the servicing is done.
This “memory region” is basically a table of fixed size entries that contain either the address of or directly the first instructions of the dedicated interrupt service routine. Depending on the size of each entry and the format, some amount of instructions could be stashed directly there. These may or may not be sufficient to completely handle the interrupt: generally they are not and the very first thing that is done is to branch somewhere else to start handling the interrupt. In case of a stored address, the CPU just directly loads it into the program counter.
Interrupts Vector Table
UPDATE - 5th of April 2022: I should thank @Rekreker, that pointed out the improper usage of the term Interrupts Vector Table (IVT) in the context of an ARMv7-A/R CPU.🤝
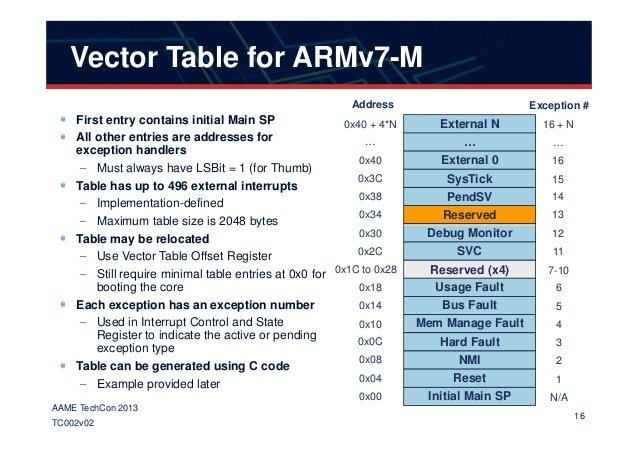
Let’s add some context before we start using the term IVT: “ARMv7-A uses the generic term exception to refer, in general terms, to interrupts and some other exception types like CPU errors. An interrupt is called an IRQ exception in ARMv7-A, so that’s the term the manual names a lot. When an ARMv7-A CPU takes an exception, it transfers control to an instruction located at the appropriate location in the vector table, depending on the exception type. The very first code we wrote for startup began with the vector table.”
This pointer table, also known as the Interrupt Vector Table (IVT), is generally stored in the lowest part of the central memory (e.g., the first n locations, we will see it later). The table entries have an index, which is the same included in the interrupts, allowing a fast lookup.
Interrupts are very similar to system exceptions, having the main difference in which is the component generating them: the first are generated by architecture-specific peripheral modules, while the second by the CPU. They are also unpredictable, whereby exceptions are deterministic and in response to certain program behavior.
When it comes to an OS the kernel handles interrupts but in bare-metal binaries, such as U-Boot, the single binary should contain and handle the IVT. The IVT is therefore a great starting point while analyzing a raw binary. In our specific case, an ARM device, we know that the IVT should be placed (it could be relocated) at the beginning of the address space: 0x00, 0x04, 0x08, … This means that finding the IVT would bring us to the beginning of the binary!
An graphical representation of an Interrupt Vector Table follows:
After searching for a while on GitHub, we found some code that confirmed the structure of the interrupt vector table for the specific SoC/Board we were analyzing. It slightly differs from the previous one as it follows some ARM SoC specific characteristics.
| |
When the processor is reset then hardware sets the pc to 0x0000 and starts executing by fetching the instruction at 0x0000. When an undefined instruction is executed or tries to be executed the hardware responds by setting the pc to 0x0004 and starts executing the instruction at 0x0004. irq interrupt, the hardware finishes the instruction it is executing starts executing the instruction at address 0x0018.
– old_timer on stackoverflow
Wanna dig deeper into IVTs, Interrupts and Exceptions handling, and how an ARM CPU boots, check the Resources section!
Evocation of the three-head dragon
Ghidra configuration - round 1°
It is time to start reversing our U-Boot binary in Ghidra.
Ghidra, when we import U-Boot, will load it as a raw binary, and we should instruct it about how it about the CPU architecture. Luckily for us, we knew from the datasheet that the SoC is composed by two ARM-A CPUs. A quick Google search of ARM-A17 reveals that it is ARMv7-EL based.
We can configure the loader accordingly with the information we found.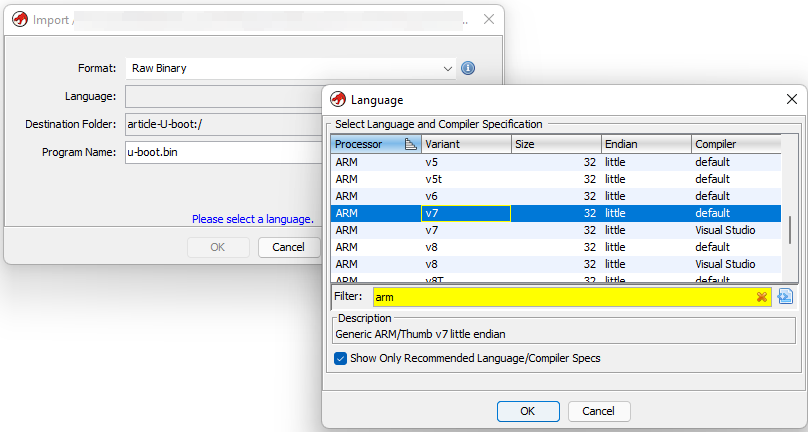
Manual analysis
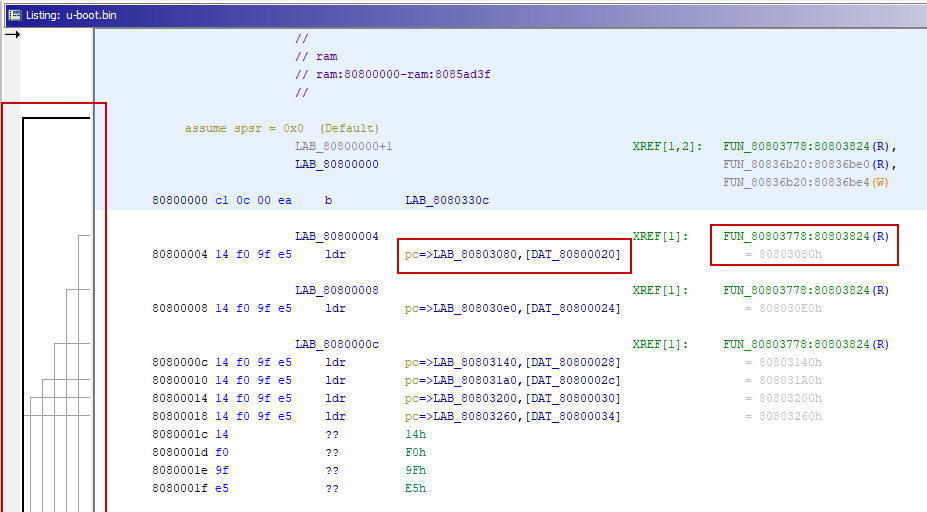
Ghidra is smart enough to recognize the IVT even before the in-depth analysis.
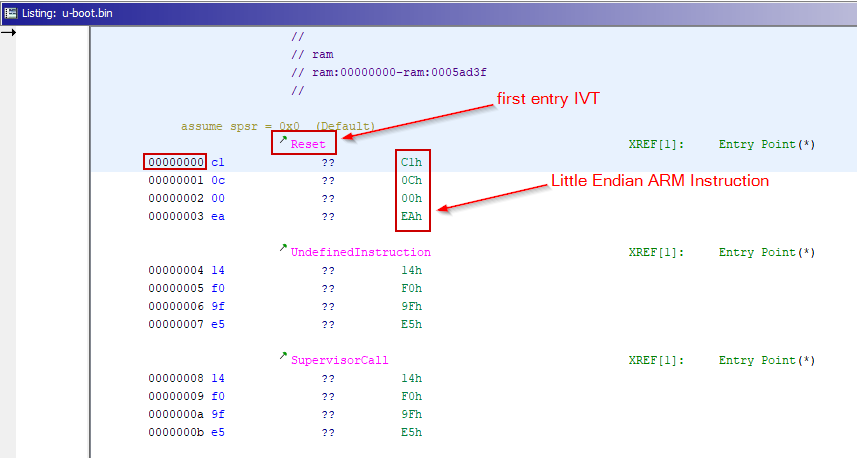
The highlighted DWORD-sized hexadecimal sequence is an unconditional ARM instruction.
Statistically, unconditional instructions are the most common ones, and they can be recognized by the first bit, which is in the 0xE0-0xEF range (remember that the architecture is little-endian, therefore the most significant bit is the last one).
A small digression on the size of the instructions.
The Arm architecture supports three instruction sets: A64, A32 and T32.
The A64 and A32 instruction sets have fixed instruction lengths of 32-bits. The T32 instruction set was introduced as a supplementary set of 16-bit instructions that supported improved code density for user code. Over time, T32 evolved into a 16-bit and 32-bit mixed-length instruction set. As a result, the compiler can balance performance and code size trade-off in a single instruction set. ARM Developer
The difference between two equivalent instructions is how they are fetched and interpreted prior to execution, not how they function. Since the expansion from 16-bit to 32-bit instruction is accomplished via dedicated hardware within the chip, it does not slow execution. However, the narrower 16-bit instructions offer memory advantages in terms of occupied space. Now let’s say that in our case the CPU is using ARM “ARM” (and not ARM Thumb) instructions, so we are working with instructions of 32bit in size. Remember that the CPU can switch to and from Thumb mode at runtime.
Let’s convert the instruction into its binary representation:
ea -> 11101010
00 -> 00000000
0c -> 00001100
c1 -> 11000001
The Branch ARM instruction is structured as follows:
- bits from 31-28: condition
- bits from 27-25: fixed sequence
- bit 24: link bit
- bits from 23 to 0: offset represented in Two’s complement
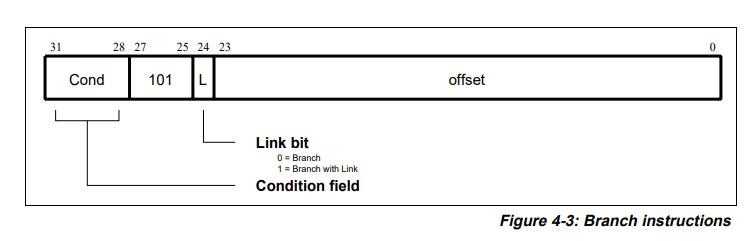
This ARM instruction is a branch (represented with a B in the ASM code), and its function is to jump (if a condition is met) to an address (PC + offset), changing the execution flow.
The first 4 bits are 1110 which corresponds to “ignore all CPU flags”: aka unconditional branch.
The next 3 bits are fixed to 101 in branch instructions.
The 7th bit indicates if the branch should store a link to return or not. If it is set to 1 then an address is stored in the R14 register and the CPU jumps back to that address when the function execution is completed. In our case the bit is set to 0 so it will just branch without storing anything to the R14 register.
The last bits store a Two’s complement 24-bit offset. This is shifted left by 2 bits for memory alignment purposes, sign-extended to 32 bits, and added to the PC+8 to obtain the memory address to jump to.
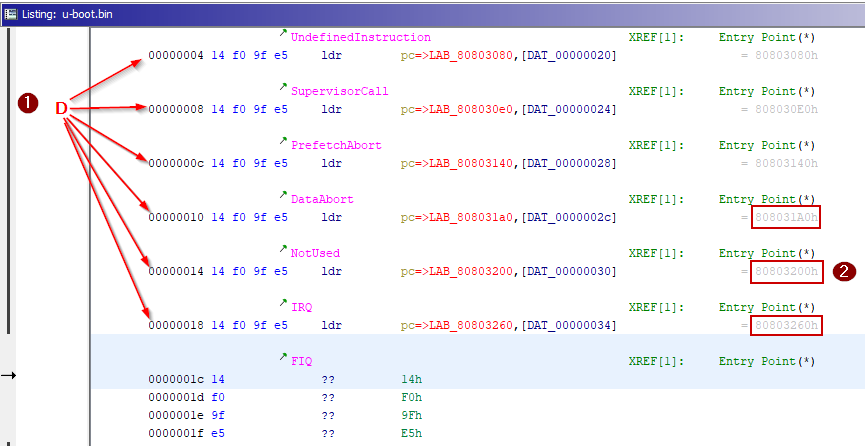
Using Ghidra’s decompiler we can decompile the first DWORD and observe that each instruction corresponds to a differential interrupt.
Despite the first interrupt (“reset”), all the others do an offset load inside the PC through the LDR assembly instruction and this is particularly interesting for us since we know where the RAM start (0x8000_0000) but not the offset of our binary.
Ghidra loads by default raw binaries at address 0x0 but we can notice that references are highlighted in red because they point outside the binary memory region.
We deduce from the references where U-Boot is actually loaded, precisely the offset is 0x0080_0000.
zi0black: I must thank @blessthe28, who gave me some clarification regarding the structure of IVT inside a bare metal binary.
Finally, we can relocate the memory block binary inside Ghidra and add the missing memory blocks (i.e. the RAM), this allows Ghidra to better analyze the binary.
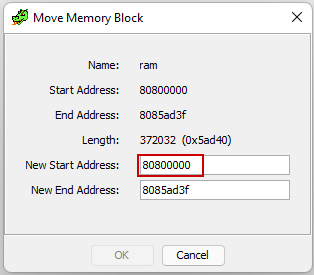
After configuring the memory blocks appropriately, we can see that Ghidra correctly identifies all the references!
We can now fire Ghidra’s auto-analysis with the aggressive search for ARM instructions.
NOTE: sometimes, the aggressive instruction finder defines certain data blocks as code, so pay attention!
Take advantage of open-source
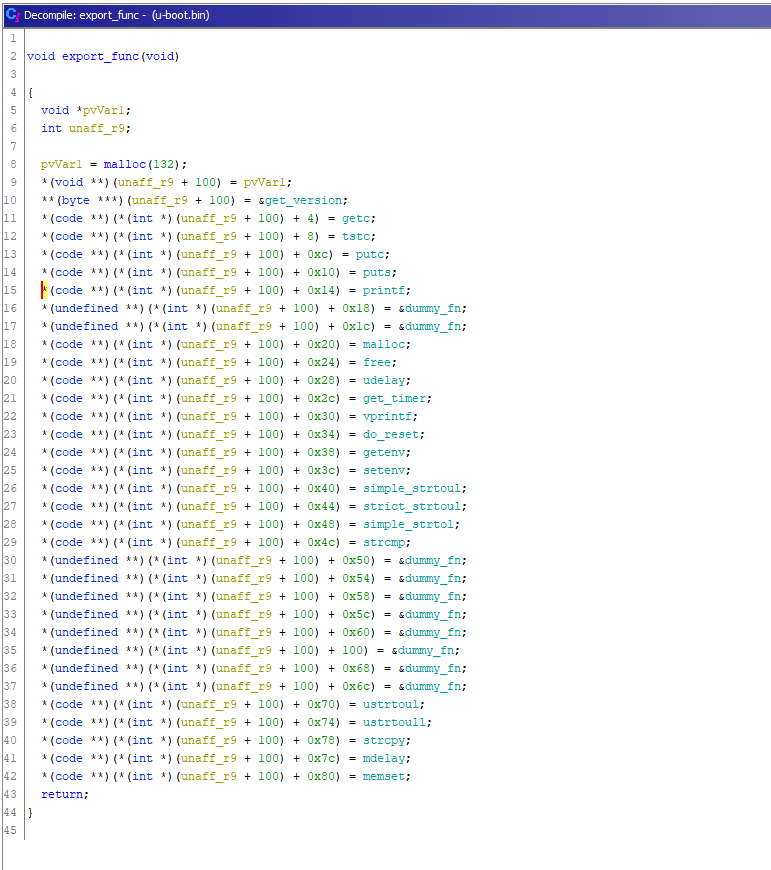
Since we have a custom implementation of U-Boot, we chose to do two things:
- Define common functions (it’s a static binary and doesn’t relay to any libC).
- Import U-Boot header files and create a custom DataTypes Library.
So we started reading some source code of DAS-U-boot and quickly identified where functions like memcpy, memcp and printf were exported, and then we searched for their code panthers in the binary under-analysis.
Meanwhile, we also started building the custom DataTypes Library.
Ghidra has good support for importing header files and resolves other imports automatically. Sometimes you might need to fix the import order if you choose to import only a few header files. This process is far from being an automatic task and requires some handwork to fix of header files.

We finally have a kinda easy-to-browse project in Ghidra, and we can jump into crypto!
Who doesn’t love crypto reversing? Us!
Now we know exactly the steps for the boot process:
- The custom U-Boot bootloader is loaded and executed.
- U-Boot Loads the encrypted Linux kernel in memory.
- U-Boot perform a key derivation function on some hardcoded data (remember, this device doesn’t use ARM Trust Zone).
- The kernel is decrypted in memory.
- The bootloader executes the kernel.
- The kernel probably decrypts the rootfs, since the bootloader does not implement such feature.
We still don’t know how the decryption mechanism is implemented since it’s custom and not present in the U-Boot source code, so we started searching for common cryptographic constants in the code to recognize the cryptographic algorithms that are used.
Basically most of the cryptographic algorithms have some kind of constants that are used to perform various type of operations. For example initialization vectors, seeds, base points, S-Boxes, etc.
When a cryptographic algorithm is implemented in a programming language, those constants are embedded in the program as data and (in our case) compiled into the binary. So it’s possible to search where such constants appear, track the functions that use them and recognize what’s going on and which algorithms are being used, even if the binary is stripped.
For this operation we used ghidra-findcrypt on the bootloader binary.
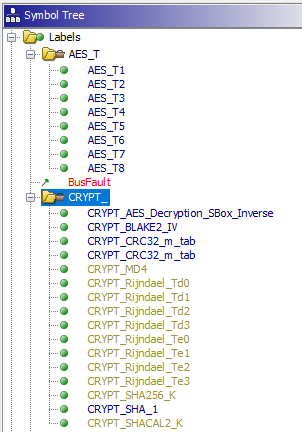
NOTE: ghidra-findcrypt detected a BLAKE2 IV but this is a false positive since BLAKE2b IV is the same as SHA-512 IV, and BLAKE2s IV is the same as SHA-256 IV.
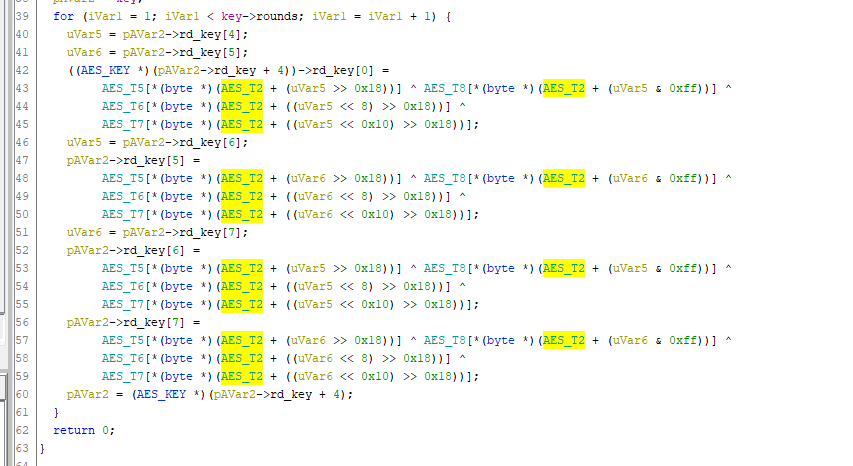
For example, in the image above we can see the AES decryption function after some variable renaming and type definition. Now the code is waaaay more readable than before, and we can diff it against a standard AES decryption function to see if they are the same. And indeed they are!
So we now know that AES is used to decrypt data and SHA1 is used for the key derivation. Our initial idea was to get the encryption keys and function parameters and write a convenient python script to decrypt the kernel.
Unfortunately, it turned out that it was using a strange mode of operation.
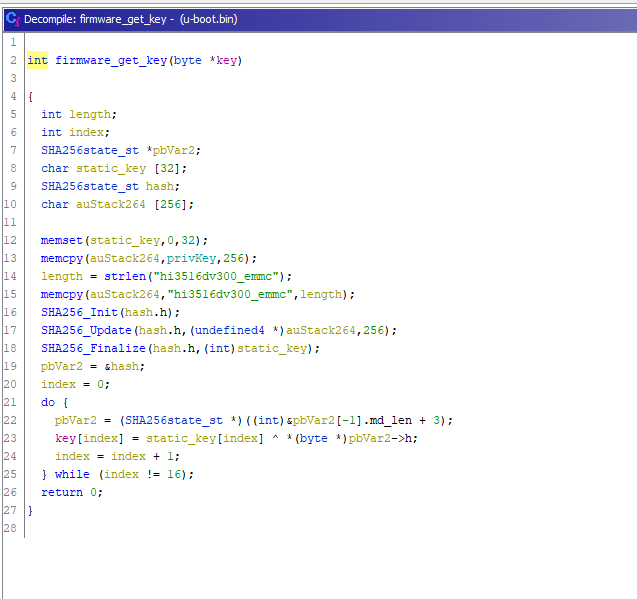
NOTE: The image represents only one of the multiple functions involved in the decryption process and key derivation.
At this point we had two options:
- Ignoring the headache, keep reversing the cryptographic algorithms, and start re-implementing it.
- Getting creative!
As you might guess, we hate headaches, and we love creativity!
In the next blogpost we will explain how we used the information gathered through the reverse engineering process to emulate U-Boot and decrypt the kernel!
STAY TUNED!
zi0black: A special thanks goes to Enrico `twiz` Perla, the author of “A Guide to Kernel Exploitation”, for peer reviewing this blogpost and for being always helpful and kind.
Resources
- http://classweb.ece.umd.edu/enee447.S2016/ARM-Documentation/ARM-Interrupts-3.pdf
- https://www.design-reuse.com/articles/38128/method-for-booting-arm-based-multi-core-socs.html
- https://stackoverflow.com/questions/6139952/what-is-the-booting-process-for-arm
- https://iitd-plos.github.io/col718/ref/arm-instructionset.pdf
- https://interrupt.memfault.com/blog/how-to-write-linker-scripts-for-firmware
- https://www.vinnie.work/docs/embeddedsystemsanalysis/firmware/baremetalbinary/
- https://www.coranac.com/tonc/text/asm.htm
- https://azeria-labs.com/writing-arm-assembly-part-1/
Previous post